




Address: No. 92, Xidazhi Street, Nangang District, Harbin


JOIN-USHIT sincerely invite talents from both home and aproad to join in the new course of constructing first-class universities. |
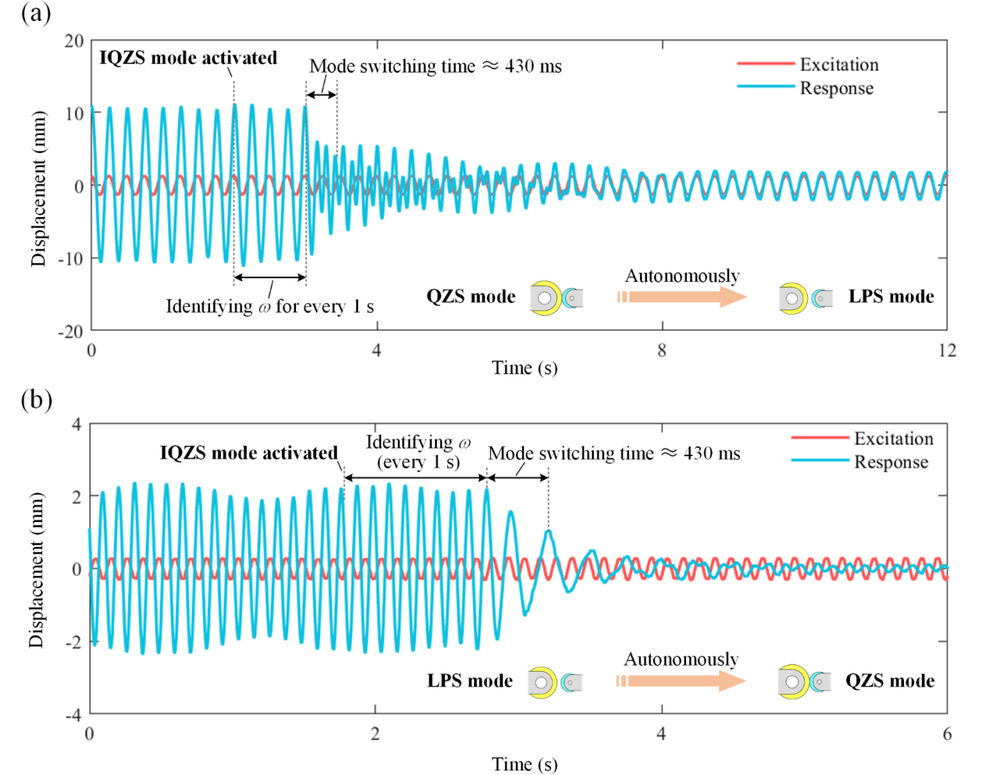
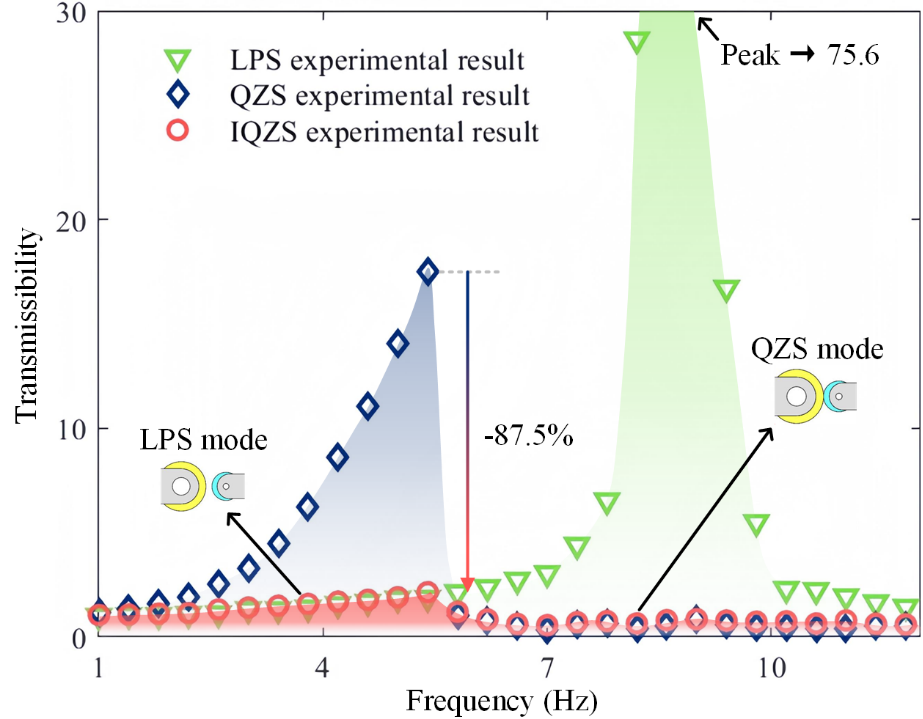
This paper presents a QZS vibration isolator with intelligent excitation adaptability, whose main structure consists of a cam-roller-spring mechanism integrated with a stepper motor and skew slider adjustment system. This system is used to control the force–displacement characteristics of the negative stiffness device. The motor-driven mechanism allows for autonomous switching between the linear-stiffness mode and the quasi-zero-stiffness mode. In experimental demonstrations, the system can achieve stable mode switching within approximately 430 ms after completing frequency identification. As a result, it offers broadband high-performance vibration isolation enabled by the quasi-zero-stiffness mechanism and significant resonance suppression effects, achieving approximately 87.5% reduction in resonance amplitude. Moreover, simulation results further indicate that the system maintains excellent vibration isolation performance under multi-frequency excitation conditions.
(1) Dual-mode QZS vibration isolator capable of autonomous stiffness-mode switching;
(2) Approach for addressing the resonance issue of traditional QZS vibration isolators;
(3) Fast, precise, and energy-efficient switching achieved between two stiffness modes;
(4) Up to 87.5% reduction of low-frequency resonance peaks for QZS vibration isolation.
Quasi-zero stiffness (QZS) vibration isolators achieve a dramatic reduction in equivalent dynamic stiffness while maintaining high static load-bearing capability by incorporating a negative stiffness mechanism. This reduction lowers the resonance frequency and the onset frequency of vibration isolation, thereby expanding the bandwidth into lower frequency ranges. As a result, QZS vibration isolators have garnered widespread attention and extensive research in recent years. Existing studies primarily focus on the parameter design and curve optimization of negative stiffness elements, aiming to further reduce the onset frequency and enhance performance in low frequencies. However, achieving near full-band vibration isolation with an onset frequency approaching zero remains a significant challenge in practical engineering applications.
More critically, once the structural parameters and stiffness modes are determined, the mechanical characteristics of the QZS vibration isolator become largely fixed, exhibiting excellent vibration isolation only within a limited target frequency band. When the external excitation frequency drifts or the energy distribution extends beyond the design frequency band, the system is prone to entering the low-frequency resonance regime. This not only makes it difficult to maintain the expected vibration isolation performance but may even lead to vibration amplification, which poses significant limitations in complex scenarios where excitation frequencies exhibit uncertainty or time-variable characteristics.
To address this issue, semi-active vibration isolation technology offers an energy-efficient and adaptive solution. Such systems can adjust mechanical parameters (stiffness, damping, or inertia) with minimal energy input, achieving real-time adaptation to frequency-variable excitations while maintaining high stability and low energy consumption. In recent years, various adjustable structures (such as origami mechanisms, electromagnetic actuators, and piezoelectric elements) have been used to construct multi-stiffness mode vibration isolation systems. These systems enable the reconfiguration of mechanical properties as needed, optimizing vibration transmission performance and demonstrating significant potential in resonance suppression and energy efficiency improvement.
However, existing semi-active vibration isolation systems generally lack autonomous adjustment capabilities, with parameter adjustments often relying on human intervention. Additionally, adjustable mechanisms face engineering challenges related to energy consumption, response delays, and long-term reliability. Therefore, despite the theoretical advantages of semi-active vibration isolation technology, key issues regarding its engineering feasibility remain unresolved, which constitutes the primary motivation for this study.
To address the aforementioned issues, this paper introduces an intelligent excitation adaptability into the quasi-zero stiffness vibration isolator (QZS-VI) to achieve a unified solution for wideband vibration isolation and resonance suppression. To this end, a cam-roller-spring structure (see Fig. 1(a)) is designed, integrated with a stepper motor to enable controllable engagement/separation switching of the negative stiffness element. The proposed intelligent QZS-VI possesses environmental sensing, logical judgment, and autonomous decision-making capabilities, allowing it to automatically determine whether parameter adjustment is needed based on changes in external excitation (see Fig. 1(b)). When the cam and roller are engaged, the system exhibits quasi-zero stiffness characteristics (QZS mode), and when separated, it exhibits linear positive stiffness characteristics (LPS mode), as shown in Figure 1c. This design effectively reduces the system's damping characteristics and ensures the vibration isolation performance when operating in the QZS mode.
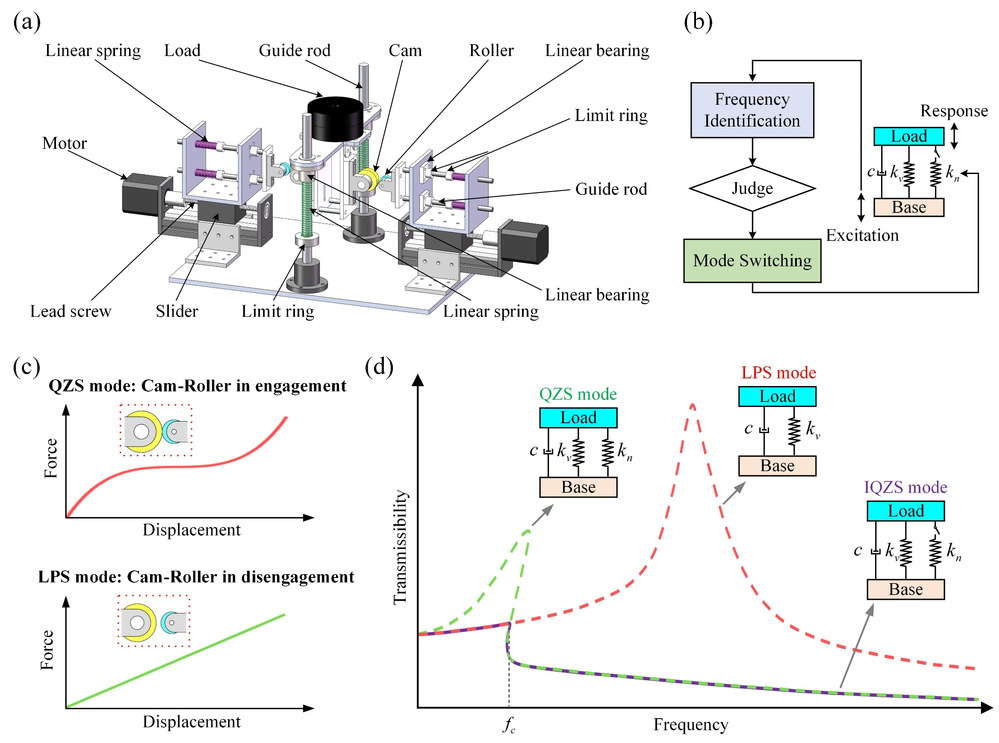
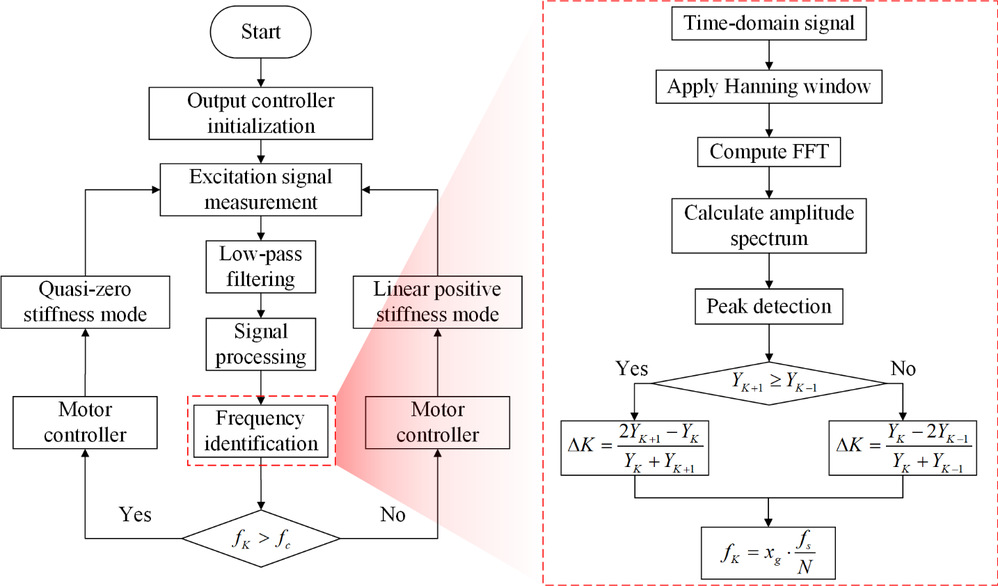
The mode switching logic of the system is determined by both the external excitation frequency and the intersection frequency fc of the transmission rate curves in the LPS and QZS modes (see Fig. 1(d)). Once the system detects that the external excitation frequency exceeds fc, the cam and roller are in contact, and the system operates in the QZS mode. When the external excitation frequency falls below fc , the cam and roller separate, and the system switches to the LPS mode (see Fig. 2).
For excitation frequency tracking, a frequency identification method based on Fast Fourier Transform (FFT) is employed. This method analyzes the frequency spectrum to obtain the dominant frequency components of the excitation. Additionally, windowing techniques and phase interpolation corrections are applied to further enhance the accuracy of frequency identification (see Figure 2).
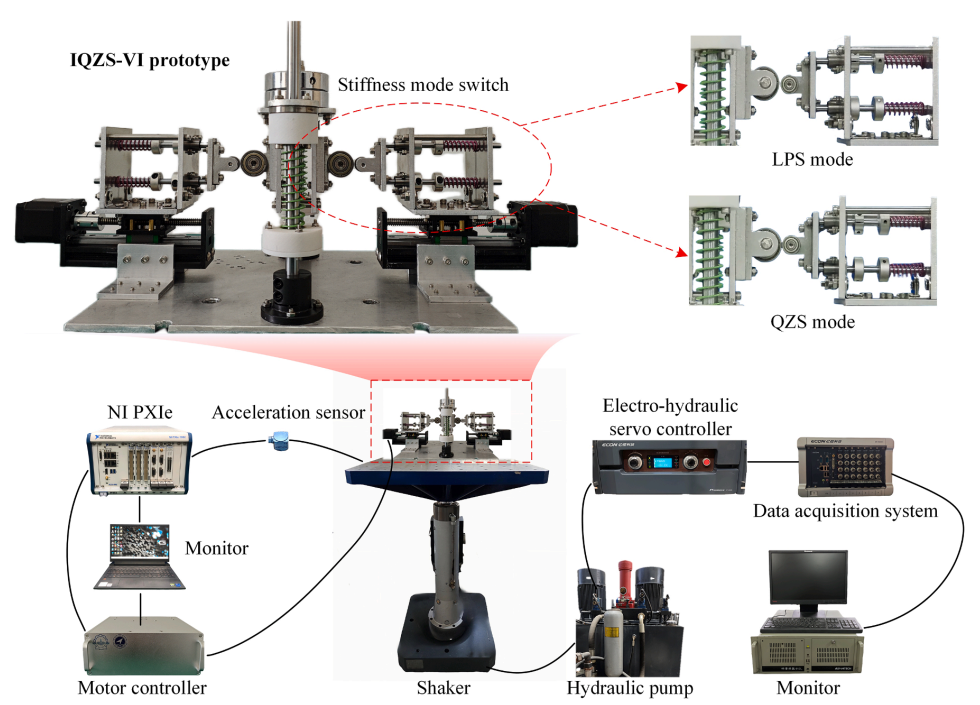
To verify the vibration control performance of the system, a prototype was designed and fabricated based on the cam-roller mechanism and linear spring (see Fig.3). In a test scenario with varying external excitation frequencies (4 Hz ↔ 9 Hz), the system autonomously achieved rapid switching between the LPS and QZS modes (see Fig.4). The results demonstrated that the vibration transmission rate in the low-frequency range was significantly lower than that of a vibration isolator with only the QZS mode, confirming the system's superior broadband vibration isolation and resonance suppression performance (see Fig.5).
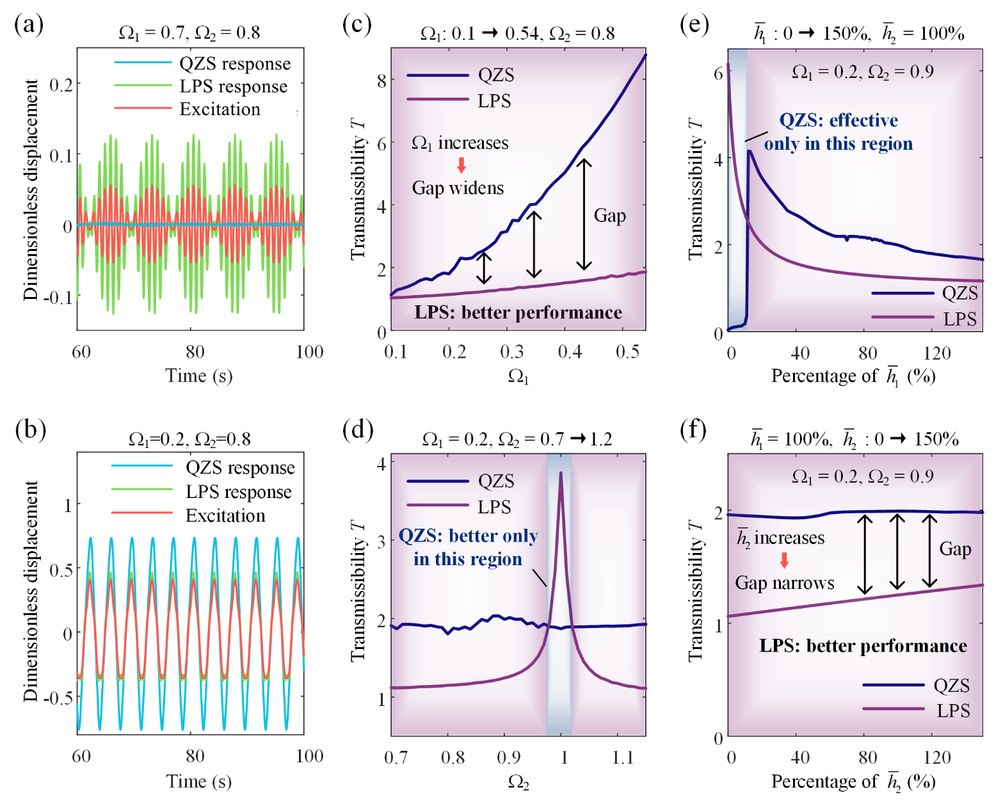
The paper further discusses the system's dynamic characteristics under dual-frequency excitation and broadband random excitation with equal intensity. Under dual-frequency excitation conditions, when all excitation frequency components fall within the bandwidth of the QZS mode, the system should select the QZS mode to achieve optimal vibration isolation. However, when one of the excitation frequency components enters the resonance regime of the QZS mode, the situation changes significantly and requires further analysis.
To investigate the effects of the external excitation frequencies Ω1 and Ω2, as well as the amplitudes h1 and h2, on the system's vibration transmission rate, the transmission rate curves of the system in both the QZS and LPS modes were simulated (see Fig.6). The analysis results show that as long as any significant excitation frequency component falls within the QZS resonance regime, the LPS mode generally exhibits better vibration isolation performance. Only when the other excitation frequency approaches the resonance regime of the LPS mode does the QZS mode potentially provide better vibration isolation performance.
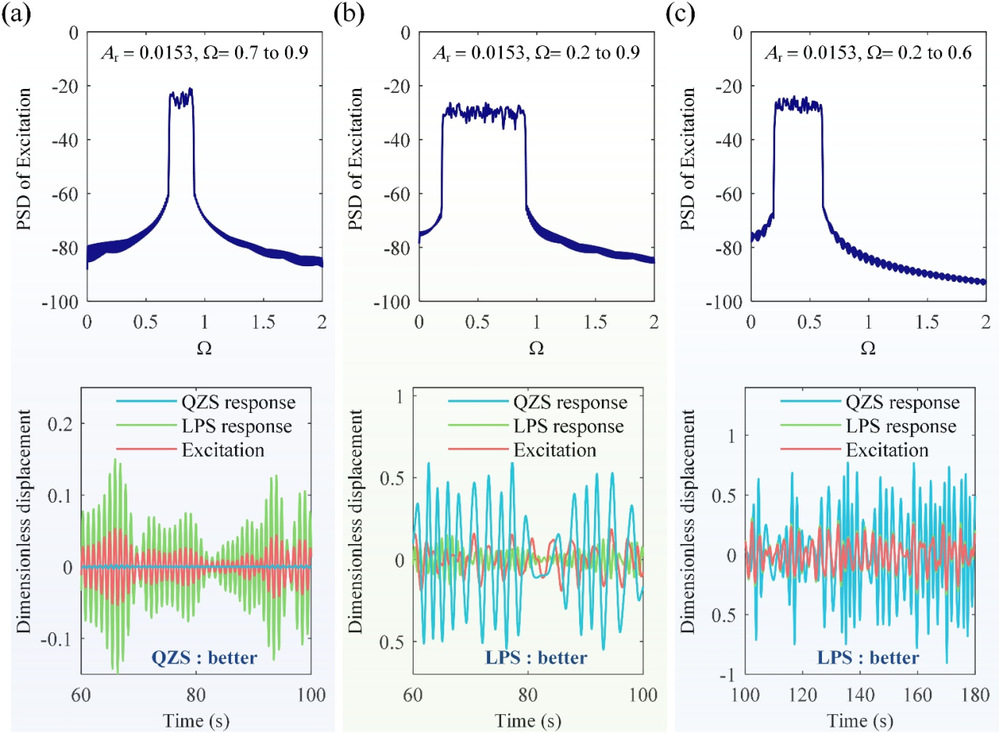
Similarly, the simulation results under broadband random excitation are consistent with the conclusions drawn from the dual-frequency excitation scenario: when the random excitation frequency band overlaps with the QZS resonance regime, switching to the LPS mode yields better vibration control performance. Conversely, when the excitation frequency band is entirely within the QZS-mode bandwidth, the QZS mode exhibits superior vibration isolation (see Fig.7). These results further validate that the system, under random excitation conditions, demonstrates better overall vibration isolation performance compared to single-mode systems.
In summary, under multi-frequency excitation conditions, the system should switch to the LPS mode whenever a significant excitation frequency component falls within the QZS-mode resonance regime, and no other components fall within the LPS-mode resonance regime. Otherwise, switching to the QZS mode would be better. Additionally, when multiple excitation frequencies simultaneously fall into the resonance regimes of both modes, the system's vibration control performance will no longer function.
The intelligent QZS vibration isolator proposed in this study combines wideband, high-performance vibration isolation with resonance suppression capabilities. Its significance lies not only in providing a new engineering approach to complex vibration control problems but also in showcasing the embodied characteristics and offering valuable conceptual insights for future design through the deep integration of structure, sensing, and control. It serves as a crucial bridge for traditional vibration control systems to transition toward embodied intelligent systems. In the present system, the mechanical body composed of the cam-roller-spring mechanism performs the physical role, while the stepper motor and slanted sliding block mechanism execute the actuation function. The external excitation recognition algorithm and semi-active control strategy form the sensing-judgment component. Together, these three elements construct an embodied intelligent feedback loop encompassing perception, cognition, and execution. The system achieves adaptive regulation to the external environment through the collaboration of structure and control, demonstrating the distributed implementation of intelligence at the physical structure level.
In the future, artificial intelligence algorithms and models could be further embedded into the system's sensing and decision-making modules, granting the system self-learning and self-evolving capabilities, from excitation recognition to the evolution of control strategies. This would further promote the deep integration and continuous development of embodied intelligence in the fields of mechanics and vibration control.
一审-宋子畅
二审-陈东萍
三审-董永康
Address: No. 92, Xidazhi Street, Nangang District, Harbin